In de School voor architectuurvereniging in Londen werken ze aan het Graduate Design-programma aan ontwerpstudies over "Behavioural Complexity", met name 3D-geprinte en pneumatische robots die een enkel, zeer specifiek doel of functie dienen volgens een enkel "eenvoudig" algoritme. Zo is Synergia een concept voor programmeerbare materie met pneumatische robotkubuszwermen, OwO zijn zoiets als robotmaden voor de openbare ruimte.

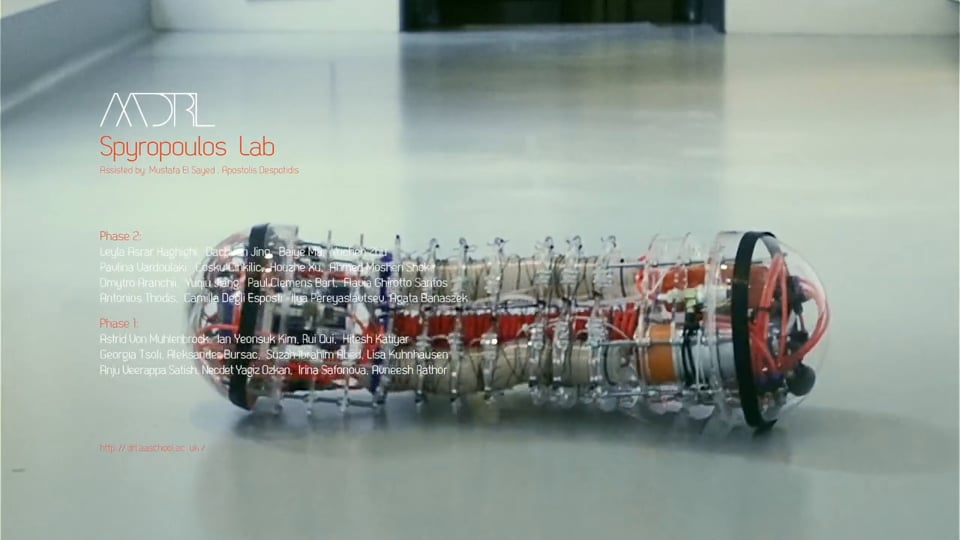
AADRL Spyropoulos Design Lab 2016 (Fase 2)
Creatieve toepassingen heeft een overzicht van de Proefschriften 2016. Je kunt de informatieteksten half negeren, er zijn altijd een heleboel pretentieuze designfranjes van mensen die coltruien dragen, maar het werk zelf zou eigenlijk kunnen worden gebruikt voor NASA en hun dergelijke pneumatische modules Bigelow-ruimtehabitat interessant zijn.
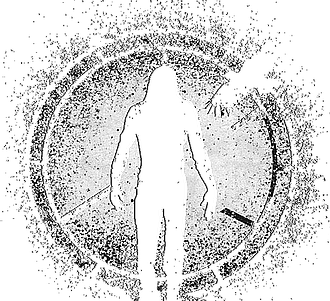
Het volgende is het werk van AADRL Spyropoulos Design Lab, dat op gedrag gebaseerde ontwerpsystemen heeft onderzocht die zelfbewust, mobiel en zelfstructurerend en assemblerend zijn. Het onderzoek onderzoekt agenten met een hoge bevolkingsmobiliteit die ontwerpen ontwikkelen die verder gaan dan eindige concepties van ruimte naar een ontwerp dat mee evolueert en zich aanpast. Het onderzoek kijkt naar het ontwikkelen van strategieën van intelligente ontwerpeenheden die door organisatie lichaamsplannen ontwikkelen die het mogelijk maken om nieuw gedrag te laten ontstaan. Een voorbeeld hiervan is het OWO-project hieronder, dat als een enkele eenheid wordt geconceptualiseerd als een eenheid die door ingebedde pneumatiek de eenheid in staat stelt uit te zetten / samen te trekken, te krullen en te rollen. Met betrekking tot mobiliteit als een individuele eenheid kan het in zijn mobiliteitsmodus rollen, maar als een eenheid bijvoorbeeld verbinding maakt met twee andere eenheden, maakt het lichaamsplan een statiefconfiguratie mogelijk, waardoor het wezen kan lopen.
AADRL Spyropoulos-ontwerplab
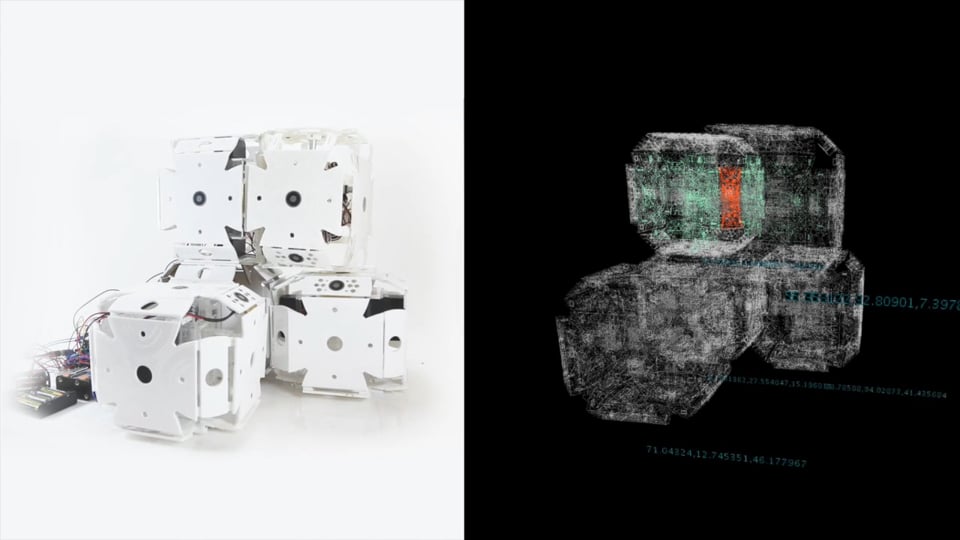
AADRL Spyropoulos_HyperCell
Meer voor jou:






 "Dravens Tales from the Crypt" betovert al meer dan 15 jaar met een smakeloze mix van humor, serieuze journalistiek - voor actualiteit en onevenwichtige berichtgeving in de perspolitiek - en zombies, gegarneerd met veel kunst, entertainment en punkrock. Draven heeft van zijn hobby een populair merk gemaakt dat niet in een hokje te plaatsen is.
"Dravens Tales from the Crypt" betovert al meer dan 15 jaar met een smakeloze mix van humor, serieuze journalistiek - voor actualiteit en onevenwichtige berichtgeving in de perspolitiek - en zombies, gegarneerd met veel kunst, entertainment en punkrock. Draven heeft van zijn hobby een populair merk gemaakt dat niet in een hokje te plaatsen is.
Mijn blog is nooit ontworpen om nieuws te verspreiden, laat staan om politiek te worden, maar met de actualiteit kan ik het niet laten hier informatie vast te leggen die anders op alle andere kanalen wordt gecensureerd. Ik ben me ervan bewust dat de ontwerppagina voor velen in dit opzicht misschien niet "serieus" lijkt, maar ik zal dit niet veranderen om de "mainstream" tevreden te stellen. Wie openstaat voor niet-statelijke informatie, ziet de inhoud en niet de verpakking. Ik heb de afgelopen 2 jaar genoeg geprobeerd mensen van informatie te voorzien, maar merkte al snel dat het nooit uitmaakt hoe het "verpakt" is, maar wat de houding van de ander er tegenover is. Ik wil niemand honing op de mond smeren om op welke manier dan ook aan de verwachtingen te voldoen, dus ik zal dit ontwerp behouden omdat ik hopelijk op een gegeven moment kan stoppen met het maken van deze politieke uitspraken, want het is niet mijn doel om door te gaan zoals dit voor altijd ![]() Ik laat het aan iedereen over hoe ze ermee omgaan. U bent echter van harte welkom om de inhoud eenvoudig te kopiëren en te verspreiden, mijn blog is altijd onder de WTFPL-licentie.
Ik laat het aan iedereen over hoe ze ermee omgaan. U bent echter van harte welkom om de inhoud eenvoudig te kopiëren en te verspreiden, mijn blog is altijd onder de WTFPL-licentie.
Het is moeilijk voor mij om te beschrijven wat ik hier eigenlijk doe, DravensTales is in de loop der jaren een cultuurblog, muziekblog, shockblog, techblog, horrorblog, leuk blog, een blog over gevonden voorwerpen op internet, internet bizar, trash blog, kunstblog, boiler, tijdgeestblog geworden , Scrap blog en grabbel blog genaamd. Alles wat klopt ... - en toch niet. De belangrijkste focus van de blog is hedendaagse kunst, in de breedste zin van het woord.
Om de werking van de site te garanderen, bent u van harte welkom Doe een donatie via creditcard, Paypal, Google Pay, Apple Pay of automatische incasso/bankrekening. Veel dank aan alle lezers en supporters van deze blog!