* Scuola dell'Associazione Architettonica a Londra stanno lavorando al programma Graduate Design su studi di progettazione sulla "complessità comportamentale", in particolare robot stampati in 3D e pneumatici che servono a un unico scopo o funzione molto specifica secondo un unico "semplice" algoritmo. Ad esempio, Synergia è un concetto per la materia programmabile con sciami di cubi di robot pneumatici, OwO sono qualcosa come vermi robot per lo spazio pubblico.

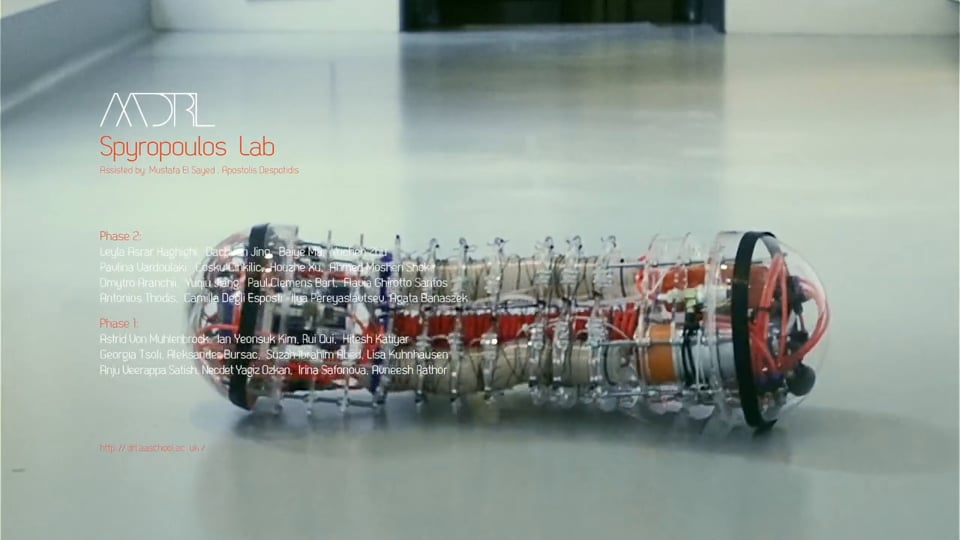
AADRL Spyropoulos Design Lab 2016 (Fase 2)
Applicazioni creative ha una panoramica di Tesi finali 2016. I testi informativi possono essere parzialmente ignorati, ci sono sempre molti campanelli di design pretenziosi e fischietti dai maglioni a collo alto, ma il lavoro stesso potrebbe essere effettivamente fatto per la NASA e i suoi moduli pneumatici del genere Habitat spaziale Bigelow per essere interessante.
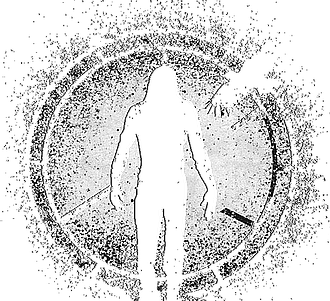
Quello che segue è il lavoro di AADRL Spyropoulos Design Lab, che ha esplorato sistemi di progettazione basati sul comportamento che sono autocoscienti, mobili e che si auto-strutturano e si assemblano. La ricerca esplora agenti di mobilità ad alta popolazione che evolvono un design che va oltre le concezioni finite dello spazio verso uno che co-evolve e si adatta. La ricerca esamina lo sviluppo di strategie di unità di progettazione intelligenti che attraverso l'organizzazione sviluppano piani corporei che consentono l'emergere di nuovi comportamenti. Un esempio di questo è il progetto OWO sotto il quale come unità singolare viene concettualizzato come un'unità che attraverso la pneumatica incorporata consente all'unità di espandersi / contrarsi, arricciarsi e rotolare. Per quanto riguarda la mobilità come unità individuale, può rotolare nella sua modalità di mobilità, ma ad esempio un'unità si collega ad altre due unità, quindi la pianta del corpo consente una configurazione a treppiede, che consente alla creatura di camminare.
AADRL Laboratorio di progettazione Spyropoulos
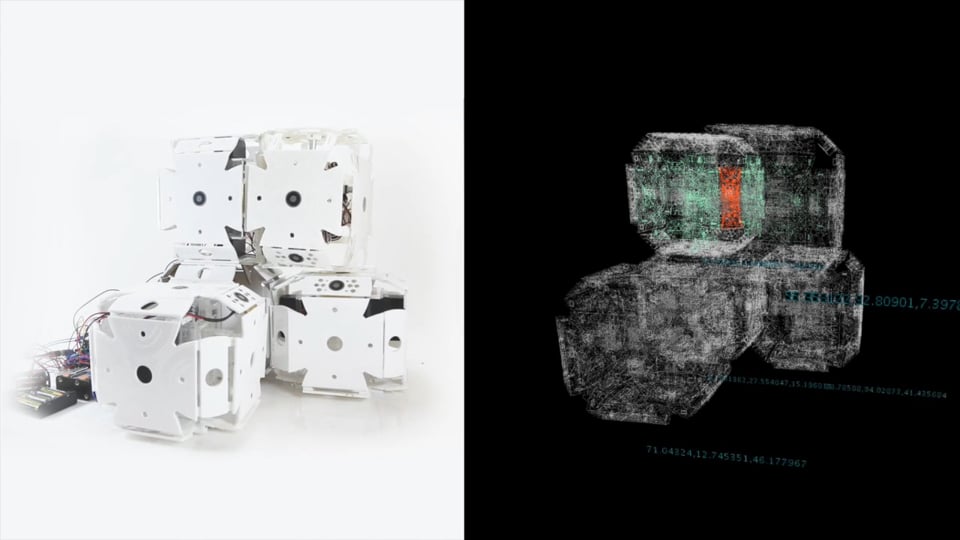
AADRL Spyropoulos_HyperCell
Altro per te:






 "Dravens Tales from the Crypt" incanta da oltre 15 anni con una miscela insapore di umorismo, giornalismo serio - per l'attualità e cronaca squilibrata nella politica della stampa - e zombie, guarnita con tanta arte, intrattenimento e punk rock. Draven ha trasformato il suo hobby in un marchio popolare che non può essere classificato.
"Dravens Tales from the Crypt" incanta da oltre 15 anni con una miscela insapore di umorismo, giornalismo serio - per l'attualità e cronaca squilibrata nella politica della stampa - e zombie, guarnita con tanta arte, intrattenimento e punk rock. Draven ha trasformato il suo hobby in un marchio popolare che non può essere classificato.
Il mio blog non è mai stato progettato per diffondere notizie, figuriamoci diventare politiche, ma con l'attualità non posso fare a meno di catturare qui informazioni che altrimenti sarebbero censurate su tutti gli altri canali. Sono consapevole che la pagina del design potrebbe non sembrare "seria" a molti a questo proposito, ma non la cambierò per accontentare il "mainstream". Chiunque sia aperto a informazioni non conformi allo stato vede il contenuto e non la confezione. Ho cercato abbastanza di fornire informazioni alle persone negli ultimi 2 anni, ma ho subito notato che non importa come sono "confezionate", ma qual è l'atteggiamento dell'altra persona nei suoi confronti. Non voglio mettere il miele sulla bocca di nessuno per soddisfare le aspettative in alcun modo, quindi terrò questo disegno perché spero che a un certo punto sarò in grado di smettere di fare queste dichiarazioni politiche, perché non è il mio obiettivo andare avanti così per sempre ![]() Lascio a tutti come affrontarlo. Puoi copiare e distribuire il contenuto, il mio blog è sempre stato sotto il Licenza WTFPL.
Lascio a tutti come affrontarlo. Puoi copiare e distribuire il contenuto, il mio blog è sempre stato sotto il Licenza WTFPL.
Trovo difficile descrivere quello che sto facendo qui, DravensTales è diventato un blog di cultura, blog musicale, blog shock, blog tecnologico, blog horror, blog divertente, un blog sugli oggetti trovati sul web, su Internet bizzarro, blog spazzatura, blog d'arte, scaldabagno, blog zeitgeist nel corso degli anni , Blog di scarto e blog di borsa da afferrare chiamato. Tutto ciò che è giusto ... - e tuttavia no. Il fulcro del blog è l'arte contemporanea, nel senso più ampio del termine.
Per garantire il funzionamento del sito, siete i benvenuti Fai una donazione con carta di credito, Paypal, Google Pay, Apple Pay o addebito diretto/conto bancario. Molte grazie a tutti i lettori e sostenitori di questo blog!