In Arkkitehtiyhdistyskoulu Lontoossa he työskentelevät Graduate Design -ohjelmassa, jossa käsitellään "Behavioural Complexity" -suunnittelun tutkimuksia, erityisesti 3D-tulostettuja ja pneumaattisia robotteja, jotka palvelevat yhtä, hyvin erityistä tarkoitusta tai toimivat yhden "yksinkertaisen" algoritmin mukaisesti. Esimerkiksi Synergia on konsepti ohjelmoitavalle aineelle pneumaattisilla robottikuutioparveilla, OwO on jotain robottitoukat julkisiin tiloihin.

AADRL Spyropoulos Design Lab 2016 (vaihe 2)
Luovat sovellukset on yleiskatsaus Lopputyöt 2016. Infotekstit voidaan jättää puoliksi huomioimatta, aina on paljon pretensiivisia muotoilukelloja ja vihellyksiä turtleneck-puseroista, mutta itse työ voitaisiin todella tehdä NASA: lle ja sen vastaaville pneumaattisille moduuleille Bigelow Space -ympäristö olla mielenkiintoinen.
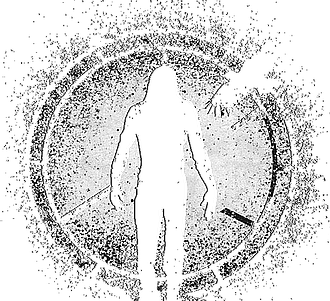
Seuraava on AADRL Spyropoulos Design Labin työ, joka on tutkinut käyttäytymisperusteisia suunnittelujärjestelmiä, jotka ovat itsetietoisia, liikkuvia ja itse rakentavia ja koottavia. Tutkimuksessa tutkitaan suuren väestön liikkuvuuden tekijöitä, jotka kehittävät muotoilua, joka ulottuu rajallisten avaruuskäsitysten ulkopuolelle kohti kehittynyttä ja sopeutuvaa. Tutkimuksessa tarkastellaan älykkäiden suunnitteluyksiköiden strategioiden kehittämistä, jotka organisaation avulla kehittävät kehon suunnitelmia, jotka antavat uudenlaisen käyttäytymisen. Esimerkki tästä on OWO-projekti, jonka alapuolella yksikköyksikkönä käsitellään yksikköä, joka sulautetun pneumatiikan avulla sallii yksikön laajenemisen / supistumisen, käpristymisen ja rullaamisen. Liikkuvuuden suhteen yksittäisenä yksikkönä se voi liikkua liikkumistilassaan, mutta esimerkiksi yksikkö muodostaa yhteyden kahteen muuhun yksikköön, sitten kehosuunnitelma sallii jalustan kokoonpanon, jonka avulla olento voi kävellä.
AADRL Spyropoulos Design Lab
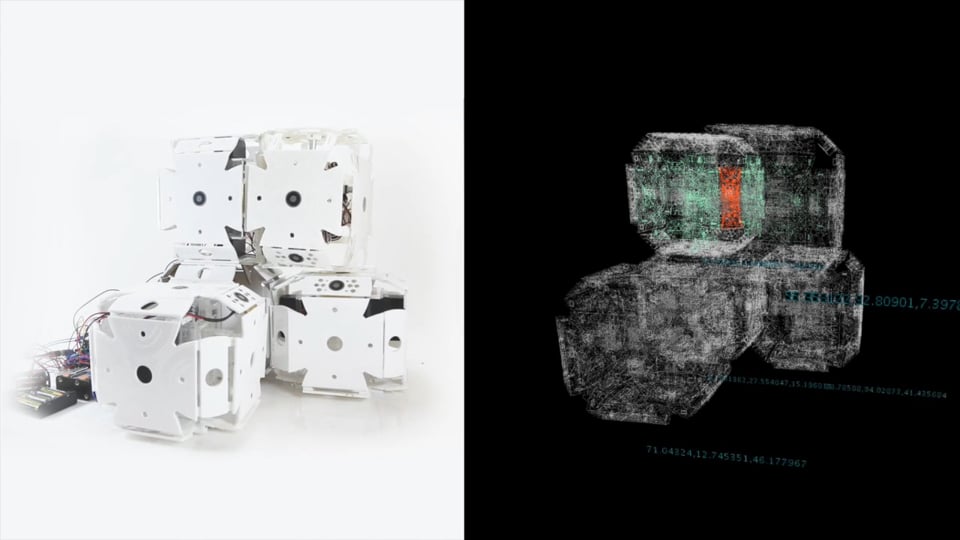
AADRL Spyropoulos_HyperCell
Lisää sinulle:






 "Dravens Tales from the Crypt" on lumoinut jo yli 15 vuoden ajan mauttomalla sekoituksella huumoria, vakavaa journalismia - ajankohtaisista tapahtumista ja epätasapainoista uutisointia lehdistöpolitiikassa - ja zombeja, koristeltu paljon taidetta, viihdettä ja punk rockia. Draven on muuttanut harrastuksensa suosituksi brändiksi, jota ei voi luokitella.
"Dravens Tales from the Crypt" on lumoinut jo yli 15 vuoden ajan mauttomalla sekoituksella huumoria, vakavaa journalismia - ajankohtaisista tapahtumista ja epätasapainoista uutisointia lehdistöpolitiikassa - ja zombeja, koristeltu paljon taidetta, viihdettä ja punk rockia. Draven on muuttanut harrastuksensa suosituksi brändiksi, jota ei voi luokitella.
Blogiani ei ole koskaan suunniteltu levittämään uutisia, saati sitten poliittisesti, mutta ajankohtaisten asioiden kanssa en vain voi olla keräämättä tänne tietoa, joka muuten on sensuroitu kaikilla muilla kanavilla. Tiedän, että suunnittelusivu ei ehkä vaikuta "vakavalta" monista tässä suhteessa, mutta en muuta tätä miellyttääkseni "valtavirtaa". Jokainen, joka on avoin valtion vaatimusten vastaiselle tiedolle, näkee sisällön eikä pakkausta. Olen yrittänyt riittävästi tarjota ihmisille tietoa viimeisen 2 vuoden aikana, mutta huomasin nopeasti, että sillä ei ole koskaan väliä miten se on "pakattu", vaan sillä, miten toinen suhtautuu siihen. En halua laittaa hunajaa kenenkään suuhun täyttääkseni odotuksia millään tavalla, joten pidän tämän mallin, koska toivottavasti jossain vaiheessa pystyn lopettamaan näiden poliittisten lausuntojen esittämisen, koska tavoitteeni ei ole jatkaa. näin ikuisesti ![]() Jätän jokaisen omaksi, miten he suhtautuvat asiaan. Olet tervetullut kopioimaan ja jakamaan sisältöä, blogini on aina ollut alla WTFPL-lisenssi.
Jätän jokaisen omaksi, miten he suhtautuvat asiaan. Olet tervetullut kopioimaan ja jakamaan sisältöä, blogini on aina ollut alla WTFPL-lisenssi.
Minun on vaikea kuvata, mitä teen täällä, DravensTalesista on tullut kulttuuriblogi, musiikkiblogi, shokiblogi, tekninen blogi, kauhublogi, hauska blogi, blogi löydetyistä tuotteista Internetissä, outo internet, roskakoriblogi, taideblogi, vedenlämmitin, zeitgeist-blogi vuosien varrella , Romu blogi ja napata laukku blogi kutsutaan. Kaikki mikä on oikein ... - ja silti ei. Blogin pääpaino on nykytaide, sanan laajimmassa merkityksessä.
Sivuston toiminnan varmistamiseksi olet tervetullut Tee lahjoitus luottokortilla, Paypalilla, Google Paylla, Apple Paylla tai suoraveloituksella/pankkitilillä. Suuri kiitos kaikille tämän blogin lukijoille ja tukijoille!